PERSONAL - Grundlagen: Betriebssysteme und Systemsoftware: Begriffe
- EDITOR'S NOTE: Dieses Dokument erhält nur übersichtliche Definitionen für manche fachchinesische Begriffe. Insbesondere werden hier Algorithmen und Übungsschemas nicht behandelt. Für die genaueren Funktionsweisen oder weitere Definitionen empfehle ich stattdessen die Vorlesungsfolien und Tutorblätter.
Einführung in GBS
- Rechensystem / Computer: offene, dynamische, technische Systeme mit der Fähigkeit, Informationen zu speichern und zu verarbeiten und mit anderen Systemen zu kommunizieren
- offenes System: System, welches mit seiner Umgebung via Schnittstellen extern kommunizieren kann
- Black-Box-Sicht: Komponentensicht, innere Implementierung von außen verborgen
- White-Box-Sicht: Komponentensicht, innere Implementierung von außen sichtbar
- dynamisches System: System bestehend aus aktiven und passiven Komponenten, dessen Zustand sich konstant ändert
- aktive Komponenten: Komponenten, die eine Zustandsänderung bewirken (z.B. CPU)
- passive Komponenten: Hilfsmittel der aktiven Komponenten (z.B. RAM)
- Betriebssystem (Operating System, OS): Software, das die Ausführung von System- und Benutzeranwendungen überwacht und eine Schnittstelle zu den Hardwarekomponenten des Systems bereitstellt
- General Purpose OS: komplexe Betriebssysteme, die eine Vielzahl an Prozessen verarbeiten und auf verschiedener Hardware laufen kann (z.B. Linux, MacOS, Windows)
- Special Purpose OS: einfache, eingeschränkte Betriebssysteme, die nur für einen bestimmten Zweck und für bestimmte Hardware entwickelt wurden
- Betriebsmodus: Unterteilung der Berechtigungen zw. Benutzer und Betriebssystem zum Schutz der Daten vor Fehlern und Angriffen
- Benutzermodus (User Mode / Space): begrenzter Modus für Benutzeranwendungen; kein direkter Hardwarezugriff, keine privilegierten Befehle, kein / nur lesender Zugriff auf Systemcode bzw. -daten, nur virtuelle Adressen erlaubt
- Systemmodus (Kernel Mode / Space): privilegierter Modus; OS-Kern läuft im Kernel Mode
- Systemaufruf (System Call, Syscall): Schnittstelle, damit Benutzeranwendungen bestimmte OS-Dienste nutzen können; ähneln Funktionsaufrufe
Betriebssystemarchitekturen
- Monolithisches System: OS-Kern beinhaltet mehrere Funktionen und befindet sich konstant im Hauptspeicher
- Mikrokern-Architektur: Unterteilung in Mikrokern (nur Basismechanismen, Kernel Mode) und Systemdienste (weitere Subsysteme, User Mode)
Betriebsarten
- Stapelverarbeitung (Batch Processing): eine bereitgestellte Menge an Daten bzw. ein Programm wird vollständig, automatisch und meist ohne Nutzerinteraktion verarbeitet
- Transaktionsbetrieb (Transaction System): Aufträge werden in Form von Transaktionen verarbeitet (insb. Datenbanken), erfüllt ACID-Kriterien (Atomicity, Consistency, Isolation, Durability)
- Dialogbetrieb (Time Sharing): Gegenteil von Batch Processing, erfordert Interaktion zwischen Benutzer und Programm / OS über ein (G)UI
- Echtzeitsysteme (Real Time System): Systeme, die an sie gestellte Echtzeitanforderungen erfüllen müssen
- hard deadline: Reaktionszeit darf nicht überschritten werden (z.B. Robotik)
- soft deadline: Reaktionszeit darf einigermaßen überschritten werden (z.B. Multimedia)
Prozess- und Prozessorverwaltung
- CPU-limitiert: ein Prozess würde schneller laufen, wenn die CPU schneller wäre (z.B. Programm, das komplexe mathematische Rechnungen macht, hängt von der Stärke der CPU ab)
- I/O-limitiert: ein Prozess würde schneller laufen, wenn das I/O-Subsystem schneller wäre (z.B. Programm, das aus einer Datei liest, hängt von der Dateigröße ab)
- Prozess: ein Programm in Ausführung, gruppiert und verwaltet Ressourcen
- sequentieller Prozess: besitzt nur 1 Thread
- multithreaded Prozess: besitzt mehrere Threads mit je einem Befehlszähler, Stack und weitere Register
- Thread: definiert einen Kontrollfluss / Ausführungsstrang in der Abarbeitung eines Programms
- Thread-Kontext: Program Counter, Stack zur Verwaltung von Unterprogrammaufrufen, Registerwerte
- User-Level-Threads: Realisierung von Threads mit Threadbibliotheken innerhalb eines Prozesses, Verwaltung der Threads durch Laufzeitsystem mit eigenem Thread-Scheduler, je eine Threadtabelle für jeden Prozess, Unterbrechung eines Threads führt zur Unterbrechung des Prozesses, OS kennt User-Level-Threads nicht!
- Kernel-Level-Threads: Realisierung und Verwaltung von Threads durch OS-Kern via Traps, Syscalls und OS-Scheduler, eine Threadtabelle für alle Threads, Unterbrechung eines Threads führt nicht zur Unterbrechung des Prozesses
- Hybride Threads: OS verwaltet Kernel-Threads, n Threads im User-Space werden auf m Threads im Kernel-Space abgebildet
- Process Control Block (PCB): Datenstruktur, enthält Informationen für die Prozessverwaltung (Register, PID, PPID, PGID...), Speicherverwaltung (Code, Data und Stack) und Dateiverwaltung (Root-Verzeichnis, File Deskriptoren der geöffneten Dateien, UID, GID) eines Prozesses
- Prozesstabelle: verkettete Liste von PCBs
- Run Queue: Warteschlange für rechenwillige Prozesse
- Wait Queue: Warteschlange für wartende Prozesse
- Zombie: Kind-Prozess, welches vor dem Eltern-Prozess terminiert und noch in der Prozesstabelle vorhanden ist
- Waisen (Orphans): Eltern-Prozess terminiert vor Kind-Prozess; Kind-Prozess wird vom Init-Prozess (PID 1) adoptiert
- Daemon: Prozess, der im Hintergrund läuft und bestimmte Dienste zur Verfügung stellt; kann aus Waisenprozess stammen
Prozessverwaltung
- Scheduler: wählt den nächsten auszuführenden Prozess aus der Run Queue
- Dispatcher: führt den Kontext- und Zustandswechsel um
- Time Sharing: eine Ressource wird von mehreren Prozessen abwechselnd benutzt
- Space Sharing: abhängige Prozesse werden Ressourcen zugeweisen und gemeinsam gescheduled
- Work Stealing: Prozesse werden aus einer lokalen Warteschlange in eine andere verschoben
- Cache-Reuse: wurde der Prozess bereits einmal auf der CPU ausgeführt, kann er vielleicht auf noch im Cache vorhandene Daten zurückgreifen
- Non-Uniform Memory Access (NUMA): Zugriffszeit auf Arbeitsspeicher ist nicht für alle CPUs identisch, Prozesse sollten möglichst nahe an dem von ihnen benötigten Speicher ausgeführt werden
- Big-Little-Architecture: Prozessorarchitektur von ARM, kombiniert kleine, schwächere, energieeffiziente Cores mit stärkeren Cores mit hohem Stromverbrauch
- Ziele:
- Fairness: alle Systeme, gebe jedem Prozess einen fairen Anteil an CPU-Nutzung
- Balance: alle Systeme, nutze alle Teile des Systems (CPU, I/O) möglichst effektiv
- Durchsatz: Batchsysteme, maximiere Anzahl an Aufträge pro Zeit
- Ausführungszeit: Batchsysteme, minimiere Ausführungszeit
- CPU-Belegung: Batchsysteme, belege CPU konstant
- Antwortzeit: interaktive Systeme, minimiere Antwortzeit
- Proportionalität: interaktive Systeme, berücksichtige Erwartungshaltung des Benutzers
- Deadlines einhalten: Echtzeitsysteme, vermeide Datenverlust
- Vorhersagbarkeit: Echtzeitsysteme, vermeide Qualitätsverlust
- Scheduling-Klassen:
- nicht-unterbrechend (non-preemptive): Prozesse werden so lange ausgeführt, bis sie blockieren oder freiwillig die CPU abgeben
- unterbrechend (preemptive): Prozesse können u.U. unterbrochen werden
- Scheduling-Strategien:
- First Come First Serve (FCFS): non-preemptive, Batchsysteme, wähle Prozesse in der Reihenfolge, in der sie angefordert werden
- Shortest Job First (SJF): non-preemptive, Batchsysteme, wähle Prozess mit kürzester Rechenzeit
- Shortest Remaining Time Next (SRTN): preemptive, Batchsysteme, unterbreche beim Eintreffen eines neuen Prozesses und wähle Prozess mit kürzester verbleibenden Rechenzeit
- Round Robin (RR): preemptive, interaktive Systeme, wechselartiges Scheduling mit Hilfe eines Zeitquantums
- Priority Scheduling: preemptive, interaktive Systeme, jedem Prozess wird eine Priorität (statisch oder dynamisch) zugewiesen, anhand welcher der nächste auszuführende Prozess ausgewählt wird
- Earliest Deadline First (EDF): non-preemptive oder preemptive, Echtzeitsysteme, self-explanatory
- Multi-Level-Scheduling:
- Short-Term-Scheduler: wählt den nächsten auszuführenden Prozess aus der Run-Queue
- Medium-Term-Scheduler: entscheidet, ob ein Prozess in den Speicher eingelagert werden soll
- Long-Term-Scheduler: erzeugt einen guten Prozessmix aus I/O- und rechenintensiven Prozessen
Synchronisation
- Kausale Beziehung: Interaktion zwischen zwei Prozessen, Ursache-Wirkung-Prinzip
- Kommunikation: Interaktion zwischen zwei Prozessen, wobei diese gegenseitig Nachrichten austauschen
- Koordinierung: Interaktion zwischen zwei Prozessen, einem Auftraggeber und einem Auftragnehmer (also Client-Server)
- Konkurrenz: Interaktion zwischen zwei Prozessen, wo beide um gemeinsame Ressourcen konkurrieren
- Race Condition: zwei oder mehrere Prozesse greifen (lesend oder schreibend) auf einer gemeinsamen Ressource zu, so dass das Ergebnis von der Reihenfolge der Prozessausführung abhängt
- Kritischer Abschnitt: Teil des Programmcodes, wo mehrere Prozesse auf gemeinsame exklusiv nutzbare Ressourcen zugreifen könnten \to erfordert Synchronisation
- Livelock: so wie ein Deadlock, aber die Programme warten nicht, sondern arbeiten weiter (quasi exzessive Höflichkeit...)
- Starvation: ein Prozess wartet unendlich lange, dass seine Ressourcenanfrage erfüllt wird
- alternativ: ein Prozess bekommt keine CPU-Zeit zugeteilt, obwohl er rechenwillig ist
Eigenschaften paralleler Systeme
- Determiniertheit: bei gleichen Bedingungen entstehen die gleichen Ergebnisse
- Störungsfreiheit: unter Einhaltung einer festen Ausführungsreihenfolge ändert sich das Ergebnis nicht
- Wechselseitiger Ausschluss (Mutual Exclusion): zu jedem Zeitpunkt greift maximal ein Prozess auf einer gemeinsamen Ressource
- Verklemmungsfreiheit (No Deadlocks): es existieren keine Deadlocks
- Kein Verhungern (No Starvation): es gibt keine Prozesse, deren Ausführung unendlich lange aufgeschoben wird, obwohl sich dieser nicht in einem Deadlock befindet
Synchronisationsmechanismen
- Unterbrechungssperre: deaktivieren von Interrupts
- Atomare Maschinenbefehle:
CMPXCHG - Spinlock (Busy Waiting, Aktives Warten): blockierter Thread wartet in Schleife und prüft ständig Zustand des Locks
- Passives Warten: Thread schläft und wartet auf Benachrichtigung, um wieder aufgeweckt zu werden
- Semaphore: abstrakter Datentyp, enthält eine ganzzahlige Kontrollvariable (entsp. Anzahl der Prozesse, die gleichzeitig den kritischen Abschnitt betreten dürfen) und zwei darauf definierte Operationen (up, down)
- Mutex: ähnlich einem binären Semaphor, mit dem Unterschied, dass nur der Owner des Locks die Sperre auch freigeben kann
Bedingungen für Deadlocks
- Mutual Exclusion: die gemeinsam benutzten Ressourcen sind exklusiv nutzbar
- Hold-And-Wait: Prozesse, die bereits Ressourcen zugeteilt haben, belegen diese, auch wenn sie noch weitere Ressourcen anfordern
- No Preemption: zugeteilte Ressourcen können nicht entnommen werden
- Circular Wait: es gibt eine zyklische Kette von zwei oder mehreren Prozessen, die jeweils auf eine Ressource warten, die vom nächsten Prozess in der Kette belegt ist
Umgang mit Deadlocks
- Ignorieren: ...
- Deadlock-Detection: OS erkennt und beseitigt Deadlocks
- Deadlock-Prevention: OS setzt eine der vorherigen Deadlock-Bedingungen außer Kraft
- Deadlock-Avoidance: OS führt keine potentiell gefährliche Ressourcenzuteilung durch
Petrinetze
- Stelle: Zustände, Ressourcen werden als Stellen (Kreise) modelliert
- Token(s): stellt dar, ob Zustand erfüllt / Ressourcen vorhanden sind (schwarze Punkte)
- Transition: Zustandsänderung (Rechtecke)
- Vorbereich: Ressourcen, die notwendig sind, damit eine Transition schaltet (linke Seite der Transition, eingehend)
- Nachbereich: Ergebnis der Zustandsänderung (rechte Seite der Transition, ausgehend)
- boolesch: für alle erreichbaren Zustände und Stellen gilt, dass in jeder Stelle des Zustands stets 0 oder 1 Token sind (impl. Stellenkapazitäten und Kantengewichte 1)
- schaltbereit: eine Transition kann schalten, d.h. die Vor- und Nachbedingungen sind erfüllt
- Vorbedingung: alle Stellen, aus denen Token genommen werden sollen, haben genügend Tokens
- Nachbedingung: alle Stellen, in die Token gelegt werden sollen, haben (aktuell!) genügend Platz
- Verklemmung eines Zustandes: es existiert keine Transition, die in diesem Zustand schalten kann; wird als Blatt im Erreichbarkeitsgraphen repräsentiert
- Verklemmungsfreiheit: es existiert kein erreichbar verklemmter Zustand
- Lebendigkeit: es existiert immer einen erreichbaren Zustand, so dass jede beliebige Transition schalten kann
- Lebendigkeit impliziert Verklemmungsfreiheit
- Verhungern einer Transition: es existiert eine unendliche Schaltsequenz, in der eine Transition schaltbereit ist, aber nie schaltet; werden u.U. als Zyklen im Erreichbarkeitsgraphen repräsentiert
- Fairness: keine Transition verhungert
Interprozesskommunikation (IPC)
- schmalbandige Kanäle: Übertragen von wenigen Bits an Information (z.B. Signale)
- breitbandige Kanäle: Übertragen größerer Datenmengen
- implizite Kommunikation: Kommunikation über gemeinsame Betriebsmittel (z.B. gemeinsamer Speicher); keine direkte Unterstützung via OS
- explizite Kommunikation: Kommunikation durch explizites Senden und Empfangen von Nachrichten, bestehend aus Header (Managementinformationen) und Payload (eigentliche Nachricht); dedizierte Interaktion mit OS (
send,recv) - synchrone Kommunikation: blockierend, Prozess A wartet nach dem Senden einer Nachricht an B auf eine Antwort (Acknowledgement) von B
- asynchrone Kommunikation: nicht blockierend, Prozess A wartet nicht auf Antwort von B
- Message Passing: Nachrichtenaustausch zwischen Sender und Empfänger, wobei der Empfänger die Nachricht des Senders entsprechend interpretiert (meist Funktionsaufruf, Signale oder Datenpakete)
- Datenstrom (Stream): kontinuierlicher Datenfluss, der fortlaufend beim Eintreten eines neuen Datensatzes (Bytestorms) verarbeitet wird
- Pipe (
|): unidirektionaler Strom zwischen zwei Kommunikationspartnern durch einen FIFO-Puffer, kann anonym oder als virtuelle Datei (named) realisiert werden - Port: logische, numerische Abstraktion eines Kommunikationsendpunktes; gehört eindeutig zu einem Prozess
- passiver Prozess: Prozess, der sich auf einer (oder mehreren) Portnummer(n) registriert und auf eingehende Verbindungen (TCP) bzw. Nachrichten (UDP) wartet
- aktiver Prozess: Prozess, der die Interaktion mit einem passiven Prozess initiiert und dafür eine freie Portnummer vom OS bekommt
- Socket: logische Verbindung zwischen Kommunikationspartnern für strombasierte Kommunikation, meist bidirektional als Zuordnung von Ports (und evtl. auch IP-Adressen) realisiert
- Server: dedizierter Prozess, der ein Dienst zur Verfügung stellt, langlebig, hat meistens mehrere Worker-Threads für jeden einzelnen Auftrag
- Client: initiiert Aufträge an einen von einem Server angebotenen Dienst, kurzlebig, meistens auf einem verschiedenen Rechner als Server
Speicherverwaltung
- Adressraum: Speicherabstraktion, jeder Prozess erhält seinen eigenen isolierten Adressraum
- physischer Adressraum: Menge aller Speicheradressen des Hauptspeichers, fortlaufend, beginnend bei 0 (Bytes)
- logischer / virtueller Adressraum: Menge des adressierbaren Speichers, Abbildung des physischen Speichers
- Speicherabbildung (Memory Adress Translation): Abbildung phys. Speicheradresse \to virt. Speicheradresse
- direkte Adressierung: 1-zu-1 Abbildung, jede logische Speicheradresse entspricht ihrer physischen Adresse
- Basis-Adressierung: jeder Prozess hat für seinen eigenen logischen Adressraum eine Basisadresse b_x
- phys. Adresse = virt. Adresse + Basisadresse
- Segmentadressierung: Unterteilung des Adressraums in logische Segmente (z.B. Code, Data, Stack) mit Segmentanfangsadresse, Segmentlänge und Zugriffsrechte
- Global Descriptor Table (GDT): enthält für jedes Segmentregister (Index) die Segmentanfangsadresse, Segmentlänge und Flags
- Swapping: Aus- / Einlagerung von Prozessdaten vom Hauptspeicher in Hintergrundspeicher eines gesamten Prozesses
- Bitmap: Datenstruktur zur Freispeicherverwaltung (Verwaltung der freien Speicherblöcke in RAM)
- pro Block 1 Bit (1 wenn Block belegt, 0 sonst)
- Verkettete Liste: Datenstruktur zur Freispeicherverwaltung
- enthält Belegungszustand des Blocks (P wenn belegt, F sonst), Startadresse des Bereichs, Länge des Bereichs (in Blöcke), Zeiger auf den nächsten Bereich (oder NULL)
Belegungsstrategien
- First-Fit: durchsuche Freelist vom Anfang an, belege den ersten Freibereich mit ausreichender Größe
- Next-Fit: durchsuche Freelist beginnend beim als letztes belegten Bereich, belege den ersten Freibereich mit ausreichender Größe
- Best-Fit: durchsuche komplette Freelist, belege Freibereich mit minimalem Verschnitt
- Worst-Fit: durchsuche komplette Freelist, belege Freibereich mit maximalem Verschnitt
- Buddy-Algorithmus: rekursive Halbierung der Freelist und Belegung des kleinstmöglichen Freibereichs, rekursive Zusammenführung zusammenhängender Bereiche (Buddies)
- siehe hier für genauere Erklärung und Beispiel
Fragmentierung
- Interne Fragmentierung / Verschnitt / Slack Space: es wird mehr Speicher gefüllt als tatsächlich benötigt wird (Fragmentierung innerhalb eines Blocks)
- Externe Fragmentierung: Löcher im Speicherbereich; es existiert theoretisch genug Speicherplatz, kann aber nicht verschmolzen werden (Fragmentierung außerhalb eines Blocks, im gesamten Speicherbereich)
Paging
- Paging: Speicherverwaltungsmethode, Ein- / Auslagerung von Seiten vom Hauptspeicher in Hintergrundspeicher
- virtueller Speicher wird in Seiten aufgeteilt
- physischer Speicher wird in Kacheln aufgeteilt
- Memory Management Unit (MMU): rechnet virtuelle Adressen in physischen Adressen um, lädt Page Table Einträge aus Cache / RAM / TLB und sendet phys. Adressen an Cache / RAM
- Page Table (Seitentabelle): Datenstruktur, speichert Mappings von virtuellen auf physischen Adressen, 1 pro Prozess
- Page Table Entry: enthält Mapping v.A \to p.A. und einzelne Bits (P, U/S, R, M, XD)
- virtuelle Adresse: besteht aus Seitennummer(n) und Offset
- Seitennummer(n): Index / Indices in Page Table(s) (ein- / mehrstufig)
- Offset: Index innerhalb der entsprechenden Seite
- physische Adresse: besteht aus Frame-Nummer und Offset
- Translation Lookaside Buffer (TLB): kleiner Cache für die Abbildung von Seiten auf Kacheln
- TLB Hit: Abbildung bereits in TLB, vermeidet Speicherzugriff
- TLB Miss: Abbildung nicht in TLB, extra Speicherzugriff nötig
- Seitenfehler (Page Fault, PF): tritt auf, wenn Seite der zugegriffenen virtuellen Adresse nicht im Hauptspeicher vorhanden ist (m.a.W. P-Bit nicht gesetzt)
- Page Fault Handler: speichert Programmzustand und deaktiviert Interrupts
- Working Set: Menge der Seiten, die ein Prozess aktuell benötigt
- Prepaging: halte Working Set für rechnende Prozesse bereit
- Seitenflattern (Thrashing): Prozess verursacht häufig Page Faults
Seitenersetzungsstrategien
- On-Demand-Paging: lade Seite sobald auf sie zugegriffen wird und sie sich nicht im RAM befindet
- Prefetching: lade Seiten im Voraus
- First-In-First-Out (FIFO): ersetze diejenige Seite, die am längsten im Speicher gehalten wurde
- Clock-Algorithmus: Verwalten der Seiten in einer zirkulären Liste (wie eine Uhr); Zeiger zeigt auf älteste Seite (genaueres Beispiel in Tutorübungen)
- Least Recently Used (LRU): ersetze diejenige Seite, die am längsten nicht verwendet wurde
- Not Frequently Used (NFU): ersetze diejenige Seite, die am wenigsten verwendet wurde
- Aging: bestimme, ob Zugriffe frisch sind oder nicht
- Working-Set-Algorithmus: ersetze nur Seiten, die sich nicht im aktuellen Working Set befinden
Dateisysteme
- Festplatte: Langzeitspeicher, lineare Sequenz von Blöcke fester Größe
- Datenblock (Sektor): kleinste in einem Zugriff les- oder schreibbare Einheit einer Festplatte
- Datei (File): logische Verwaltungseinheit, Abstraktion der Festplatte, speichert Daten dauerhaft
- Dateisystem (File System): Datenstruktur zur Organisation und Verwaltung von Dateien
- NTFS: Windows NT File System, für moderne Windows-Systeme
- Ext2/3/4: Extended File System, für Linux-Kernel
- Dateitypen:
- Datei (regular file): Text- oder Binärdateien
- Verzeichnis (directory): Systemdatei zur Verwaltung und Strukturierung des File Systems
- Character Special File: Schnittstelle für serielle I/O-Geräten (Terminals, Drucker...)
- Block Special File: Schnittstelle für Massenspeicher (HDDs, SSD, USBs, CDs...)
- Sequential Access: Prozess liest der Reihe nach Bytes einer Datei
- Random Access: Prozess liest Bytes einer Datei in einer beliebigen Reihenfolge
lseek: Syscall, spezifiziert / modifiziert aktuelle Position in Datei- Single-Level Verzeichnisstrukturen: nur ein Root-Verzeichnis für alle Dateien
- Hierarchische Verzeichnissstukturen: Gruppierung von Dateien in Unterverzeichnissen
- Absoluter Pfadname: gesamter Pfad einer Datei, ausgehend vom Root-Verzeichnis
- Relativer Pfadname: Pfad einer Datei ausgehend vom aktuellen Arbeitsverzeichnis
- Current Working Directory (CWD): der Ordner, in dem wir uns gerade befinden
.: aktuelles Arbeitsverzeichnis (CWD)..: übergeordnetes Verzeichnis des CWDs
Dateisystem-Implementierung
- Partition: logisch abgetrennte Datenblöcke einer Festplatte mit je einem Dateisystem
- Master Boot Record: erster Sektor der Festplatte, enthält MBR-Programm
- MBR-Programm (Startprogramm, Bootloader): lädt Boot-Sektor der aktiven Partition
- Partitionstabelle: Datenstruktur zur Verwaltung der Partitionen (Anfangs- und Endadressen), liegt direkt nach dem MBR
- Boot-Sektor / Boot-Block: erster Block einer Partition, enthält notwendige Informationen zum Starten eines OS
- Superblock: enthält Metadaten über das File System
- Contiguous Allocation: Datei wird als zusammenhängende Folge von Blöcken verwaltet
- Linked List Allocation: benutzte Blöcke einer Datei werden in einer Linked List verwaltet
- File Allocation Table (FAT): Datenstruktur zur Verwaltung der Zeiger der Linked List innerhalb einer gemeinsamen Tabelle für alle Dateien, liegt im Hauptspeicher
- Index Node (i-node): Datenstruktur zur Repräsentierung einer Datei (Dateiattribute + Adressen der belegten Blöcke + Adressen von Zeigerblöcke), wird pro geöffnete Datei im Hauptspeicher geladen
- indirekte, doppelt indirekte und dreifach indirekte Blöcke: Verzweigungsgrad des Zeigerblocks
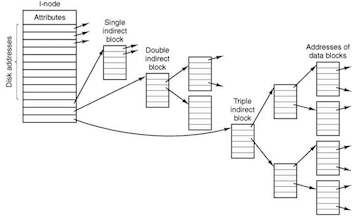
- indirekte, doppelt indirekte und dreifach indirekte Blöcke: Verzweigungsgrad des Zeigerblocks
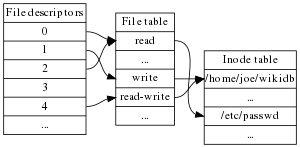
- File Descriptor Table (pro Prozess): enthält Dateideskriptoren (hier Indizes) eines Prozesses, Einträge zeigen auf Einträge in der Open File Table
- (Open) File Table: enthält Informationen über alle gerade offenen Dateien (u.a. Reference Counter und Offset-Pointer), Einträge zeigen auf Einträge in inode-Tabelle
- Inode Table: Tabelle für im Hauptspeicher geladene inodes
- Verzeichniseintrag (directory entry): enthält Dateinamen, Adressinformationen und Verweis auf Dateiattribute
- Hard Link: Datei, die auf dieselbe Inode wie eine andere Datei zeigt
- Symbolic Link: Datei mit Verweis auf verlinkte Datei durch Angabe des Pfadnamens (ähnlich zu einem Windows-Shortcut); unterschiedliche Inode wie ursprüngliche Datei!
- Journaling: Protokollierung aller Änderungen eines Dateisystems in einem Journal (Speicherbereich) vor ihrer Durchführung
- Idempotente Operation: Operation, die bei mehrmaliger Ausführung dasselbe Ergebnis liefert
- Virtual File System (VFS): Abstraktionsschicht; stellt Schnittstelle für Anwendungen bereit, um auf unterschiedliche Dateisysteme zuzugreifen
- Buffer Cache: Pufferplatz für Datenblöcke im Hauptspeicher
- Read-Ahead: lade in Kürze benötigte Datenblöcke in den Buffer Cache
- Defragmentierung: Neugruppierung der Blöcke auf der Festplatte
Ein- und Ausgabe (I/O)
- Blockorientierte Geräte (block devices): Daten werden als Blöcke gesendet und empfangen, Inhalte adressierbar, Random Access möglich
- Zeichenorientierte Geräte (character devices): Daten werden als Zeichenströme (Byteströme) gesendet und empfangen, Inhalte nicht adressierbar
- Geräte-Steuereinheit (Device Controller): Hardwarekomponente, bietet Hardwareschnittstelle zwischen PC (OS) und I/O-Gerät an, besitzt Status- und Steuerregister, Datenpuffer und Interruptleitung
- Memory-Mapped-I/O (MMIO): die Register des Hardwarecontrollers werden in den RAM-Adressraum abgebildet, um Kommunikation mit üblichen Speicheradressierung (statt I/O-Befehlen) zu erlauben
- Port-Mapped-I/O (PMIO) oder Isolated I/O: Nutzung eines separaten, kleineren, isolierten Adressraumes für Datentransfere; Kommunikation geschieht via I/O-Instruktionen (z.B.
in,out) - Programmed I/O: Datentransfermethode zwischen CPU und I/O-Gerät, wo die CPU für jeden Datentransferschritt via CPU-Instruktion(en) immer direkt beteiligt ist (z.B. Netzwerkkarte \leftrightarrow CPU \leftrightarrow RAM)
- Programmable Interrupt Controller (PIC): Hardwarekomponente (Controller), hilft CPU beim Handling von IRQs (Interrupt Requests)
- Interrupt Request (IRQ): Hardwaresignal, fordert Interrupthandling von CPU
- Interrupt-Handler: Codesegment, das bei Auslösung eines Interrupts ausgeführt wird
- Interruptvektor: Adresse, an die beim Auftreten eines Interrupts gesprungen wird (wo die Interruptroutine liegt)
- Direct Memory Access (DMA): Datentransfermethode, wo Hardwarekomponenten unabhängig von der CPU mit I/O-Geräte Datentransfer durchführen können (z.B. Netzwerkkarte \leftrightarrow DMA-Controller \leftrightarrow RAM)
- DMA Controller (DMAC): Hardwarekomponente (Controller), regelt Datentransfer zwischen RAM und I/O-Gerät (von CPU initialisiert, sendet bei Abschluss Interrupt an CPU)
- Gerätetreiber (Driver): Software zur Steuerung von I/O-Geräten, Abstraktionsebene, stellt Schnittstelle zwischen OS / Programme und I/O-Geräte bereit
- Geräte-unabhängige Software: einheitliche Schnittstelle zwischen Treibern und OS mit zusätzlicher Puffer-, Fehlerbehandlungsfunktionalität
- Major Device Number: Teil einer Gerätedatei-Inode; entsp. Gerätetreiber
- Minor Device Number: Teil einer Gerätedatei-Inode; entsp. Gerät, auf das zugegriffen werden soll
- Spooling: Datenaustauschmethode zwischen zwei Geräte, Aufträge werden via Spoolerdämon gepuffert und gequeued und vom I/O-Gerät entnommen
- Hardware-Timer: Hardwarekomponente, generiert Interrupt, wenn Timer abgelaufen ist
- Line Discipline: Bestandteil der Terminaltreibers; wie wird die Eingabe verarbeitet?
- Cooked Mode: zeilenorientiert, Eingabe wird vorverarbeitet (preprocessed), bevor es gesendet wird
- Raw Mode: zeichenorientiert, Eingabe wird ohne Vorverarbeitung weitergeschickt
- Pseudoterminal: Art der IPC, ermöglich asynchronen, bidirektionalen Datenaustausch
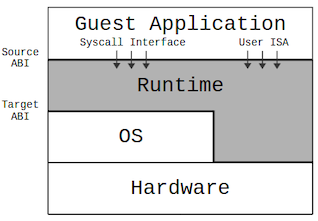
Virtualisierung
- Abstraktionsschicht: die Realisierung der Elemente unter dieser Schicht wird für einem Anwender "verborgen"
- Schnittstellen (Interfaces): trennen Abstraktionsschichten voneinander, definieren Softwaresicht auf Hardware
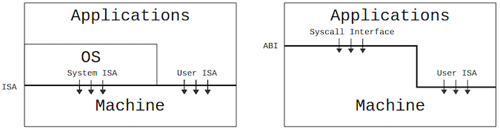
- Instruction Set Architecture (ISA): Interface zwischen OS und Hardware, definiert u.a. ASM-Instruktionen
- User-ISA: verfügbarer Instruktionssatz für Benutzeranwendungen
- System-ISA: verfügbarer Instruktionssatz für OS
- Application Binary Interface (ABI): Interface zwischen Anwendungen und OS, definiert u.a. wie auf Datenstrukturen auf Maschinencodeebene zugegriffen werden (z.B. Calling Convention...)
- Syscall Interface: Interface, abstrahiert Implementierung der Syscalls durch bereitgestellte Funktionen
-
Laufzeitumgebung (Runtime Environment): alle Ressourcen, die ein Programm benötigt, um zu laufen
- virtuelle Laufzeitumgebung: Abbilden von virtuellen auf physischen Ressourcen (m.a.W. Ressourcen, wie z.B. CPU, Speicher, I/O-Geräte, werden virtuell "emuliert", das virtualisierte System innerhalb einer VM betrachtet diese als echte physische Ressourcen)
-
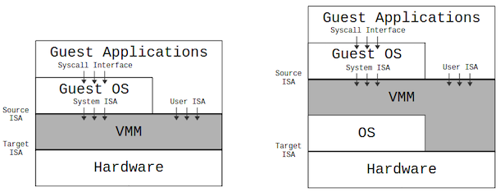
Virtuelle Maschine: virtualisiertes System
-
Virtual Machine Monitor / Hypervisor: Abstraktionsschicht zwischen Hardware und Guest OS / Guest Applications (virtualisierte Software), bieten virtuelle Laufzeitumgebung (u.a. virtuelle ISA), virtualisiert gesamte physische Maschine
- Type 1 Hypervisor: wird direkt auf Hardware ausgeführt
- Type 2 Hypervisor: wird auf einem Host OS ausgeführt, nutzt Gerätetreiber des Host OS
Komponentenweise Virtualisierung
- CPU-Virtualisierung:
- Paravirtualization: modifiziertes Gast-OS, Syscalls des Gast-OS werden durch Hypercall-Interface via VMM virtualisiert
- Binary Translation: unmodifiziertes Gast-OS, Hypervisor interpretiert Binärcode des Gast-OS
- Hardware-Assisted Virtualization: unmodifiziertes Gast-OS, hardwareunterstützt durch Hardware Virtualization Extensions
- Instruktionsklassen:
- Privileged Instructions: Instruktionen, die nur im System Mode ausgeführt werden dürfen
- Sensitive Instructions: Instruktionen, die die Systemkonfiguration ändern (Control-Sensitive Instructions) oder Instruktionen, die sich anders verhalten, als wenn sie im User-Mode ausgeführt würden (Behavior-Sensitive Instructions)
- Innocuous Instructions: alle anderen Instruktionen
- Speicher-Virtualisierung:
- Host-Physische Adressen (HPA): gesamter echter physischer Speicher im System
- Gast-Physische Adressen (GPA): der Speicher, der ein Gast OS sieht
- Gast-Virtueller Speicher / Gast-Virtuelle Adressen (GVA): wie üblicher virtueller Speicher (pro Prozess), nur innerhalb eines Gast OS
- Shadow Page Tables (SPT): erste Stufe der Adressabbildung, bilden gast-virtuelle Adressen auf host-physische Adressen ab, pro Prozess, vom Hypervisor verwaltet
- Second Level Address Translation (SLAT): zweite Stufe der Adressabbildung, bildet gast-physische Adressen auf host-physische Adressen ab
- Statische Speicherallokation: Speichergröße des VMs bleibt konstant
- Dynamische Speicherallokation: Speicher wird dynamisch reduziert / allokiert
- Ballooning (Balloon Driver): Softwarekomponente innerhalb eines Gast OS', teilt dem Hypervisor mit, ob mehr / weniger Speicher benötigt wird
- I/O-Virtualisierung:
- Full Virtualization / Emulation: Hypervisor emuliert I/O-Geräte in Software
- Paravirtualization: Virtualisierung durch Split-Driver-Architektur
- Backend-Treiber: dedizierte, privilegierte VM greift direkt auf I/O-Geräte zu
- Frontend-Treiber: Treiber innerhalb einer Gast-OS, kommuniziert mit Backend-Treiber
- Device Domains: eine VM dient als Schnittstelle zu allen I/O-Geräten
- Direct I/O: hardwareunterstütztes Multiplexing von I/O-Geräten mit dedizierter I/O-MMU
- Single Root I/O Virtualization (SR-IOV): I/O-Gerät unterstützt direkt Virtualisierung
Arten von Virtualisierung
- Process Virtual Machine: Laufzeitumgebung eines einzelnen Prozesses wird virtualisiert \to Plattformunabhängigkeit
- High-Level-Language VMs (HLL VMs): definieren eine plattformunabhängige virtuelle ISA
- System Virtual Machine: Laufzeitumgebung eines gesamten Betriebssystems (ganzes System) wird virtualisiert
- OS-Level-Virtualization, Container: Laufzeitumgebung mehrerer Prozesse wird virtualisiert, OS Kern wird nicht virtualisiert

- Linux Namespaces: Abstraktion / Einschränkung der Sicht auf globalen Ressourcen in einem Linux-System (UTS, IPC, Network, PID, User, Mount)
- Linux Control Groups (cgroups): unterteilen Prozesse in Prozessgruppen und verteilen bestimmte Systemressourcen für jede Prozessgruppe
- Secure Computing Mode (seccomp): Einschränkung der verfügbaren Syscalls für ein Prozess
- Strict: nur
read(),write(),exit()undsigreturn()verfügbar, sonst wird SIGKILL getriggert - Filter: steuert, welche Syscalls erlaubt sind
- Disabled: alle Syscalls erlaubt
- Strict: nur
Summary by Flavius Schmidt, ge83pux, 2024.
https://home.in.tum.de/~scfl/
Images from "Modern Operating Systems" by Tanenbaum and Bos.